
 Robotika dalam dunia komputer mempunyai beragam pengertian, istilah robotika pertama kali berasal dari bahasa Cekoslowakia. Kata robot berasal dari
kosakata “Robota” yang berarti “kerja cepat”. Istilah ini muncul pada tahun
1920 oleh seorang pengarang sandiwara bernama Karel Capec. Karyanya pada
saat itu berjudul “Rossum’s Universal Robot” yang artinya Robot Dunia milik
Rossum. Rossum merancang dan membangun suatu bala tentara yang terdiri
dari robot industri yang akhirnya menjadi terlalu cerdik dan akhirnya menguasai
manusia.
Kata Robotika juga berasal dari novel fiksi sains “runaround” yang
ditulis oleh Isaac Asimov pada tahun 1942. Sedangkan pengertian robot secara
tepat adalah sistem atau alat yang dapat berperilaku atau meniru perilaku
manusia dengan tujuan untuk menggantikan dan mempermudah kerja/aktifitas
manusia.
Untuk dapat diklasifikasikan sebagai robot, maka robot harus memiliki
dua macam kemampuan yaitu:
1) Bisa mendapatkan informasi dari sekelilingnya.
2) Bisa melakukan sesuatu secara fisik seperti bergerak atau memanipulasi
objek.
Untuk dapat dikatakan sebagai robot sebuah sistem tidak perlu untuk
meniru semua tingkah laku manusia, namun suatu sistem tersebut dapat
mengadopsi satu atau dua dari sistem yang ada pada diri manusia saja sudah
dapat dikatakan sebagai robot. Sistem yang diadopsi dapat berupa sistem
penglihatan (mata), sistem pendengaran (telinga) ataupun sistem gerak.
Sebuah robot dapat saja dibuat untuk berbagai macam aktifitas, namun
sebuah robot harus dibuat dengan tujuan untuk kebaikan manusia.
Robotika dalam dunia komputer mempunyai beragam pengertian, istilah robotika pertama kali berasal dari bahasa Cekoslowakia. Kata robot berasal dari
kosakata “Robota” yang berarti “kerja cepat”. Istilah ini muncul pada tahun
1920 oleh seorang pengarang sandiwara bernama Karel Capec. Karyanya pada
saat itu berjudul “Rossum’s Universal Robot” yang artinya Robot Dunia milik
Rossum. Rossum merancang dan membangun suatu bala tentara yang terdiri
dari robot industri yang akhirnya menjadi terlalu cerdik dan akhirnya menguasai
manusia.
Kata Robotika juga berasal dari novel fiksi sains “runaround” yang
ditulis oleh Isaac Asimov pada tahun 1942. Sedangkan pengertian robot secara
tepat adalah sistem atau alat yang dapat berperilaku atau meniru perilaku
manusia dengan tujuan untuk menggantikan dan mempermudah kerja/aktifitas
manusia.
Untuk dapat diklasifikasikan sebagai robot, maka robot harus memiliki
dua macam kemampuan yaitu:
1) Bisa mendapatkan informasi dari sekelilingnya.
2) Bisa melakukan sesuatu secara fisik seperti bergerak atau memanipulasi
objek.
Untuk dapat dikatakan sebagai robot sebuah sistem tidak perlu untuk
meniru semua tingkah laku manusia, namun suatu sistem tersebut dapat
mengadopsi satu atau dua dari sistem yang ada pada diri manusia saja sudah
dapat dikatakan sebagai robot. Sistem yang diadopsi dapat berupa sistem
penglihatan (mata), sistem pendengaran (telinga) ataupun sistem gerak.
Sebuah robot dapat saja dibuat untuk berbagai macam aktifitas, namun
sebuah robot harus dibuat dengan tujuan untuk kebaikan manusia.
Anatomi Robot :
Keterangan :
- Sensor
- Aktuator
- Catu Daya
- Kontroler
- Sistem Komunikasi
- Sistem Pemindah
- Manipulator/End Effector
- Rangka
Tabel ekivalensi komponen robot :

Sensor adalah peranti untuk menerima suatu
besaran/sinyal fisik yang kemudian meneruskannya ke kontroler. Terdapat dua
jenis sensor pada robot, yaitu sensor internal yang menerima informasi dari
bagian robot dan sensor eksternal yang menerima informasi dari lingkungan di
luar robot. Contoh dari sensor internal adalah sensor kecepatan atau torsi
motor, sedangkan contoh sensor eksternal adalah sensor cahaya, temperatur,
suara, tekanan, vision, dan sensor-sensor lainnya.
Aktuator adalah peranti yang menghasilkan
gerakan pada robot. Motor listrik, pneumatika, dan hidrolika adalah contoh dari
aktuator. Selain output gerakan, pada suatu robot sering kali diperlukan output
dalam bentuk lain, misalnya display untuk menampilkan keadaan sensor ataupun
aktuator. Display dapat berupa LED, seven segment, ataupun LCD. Robot
memerlukan catu daya sebagai sumber tegangan untuk seluruh rangkaian elektronik
yang terdapat di dalamnya.
Catu daya atau sering disebut
dengan Power Supply adalah sebuah piranti yang berguna sebagai sumber listrik
untuk piranti lain. Pada dasarnya catu daya
bukanlah sebuah alat yang menghasilkan energi listrik saja, namun ada beberapa catu daya yang menghasilkan energi mekanik,
dan energi yang lain bentuknya dapat berupa batere, aki, listrik AC (via adaptor),
dan sel surya.
Sistem komunikasi adalah setiap
data (informasi) yang diberikan pada masing-masing robot merupakan informasi
maupun perintah bagi robot untuk mengerjakan suatu, dan alat komunikasi antar robot maupun dengan manusia seperti halnya mulut dan telinga pada manusia.
Sistem pemindah adalah komponen untuk bergerak robot dari satu tempat ke tempat lain, fungsinya seperti halnya kaki pada manusia.
Manipulator
adalah bagian mekanik yang dapat difungsikan untuk memindahkan, mengangkat
benda kerja, manipulator
merupakan salah satu komponen penting dalam menunjang aktifitas suatu sistem
robotika. Dan manipulator
(sistem mekanik) merupakan “tulang” / “lengan” / ”tangan” dari sebuah sistem
robotika tersebut
Rangka adalah tempat/wadah dari seluruh
komponen robot terpasang. Bermacam-macam material dapat digunakan sebagai
rangka, di antaranya plastik, kayu, ataupun logam.
Kontroler adalah peranti yang berfungsi untuk
mengolah informasi yang diberikan sensor dan kemudian memberikan perintah
kepada aktuator untuk melakukan hal tertentu. Misalnya pada suatu robot pencari
cahaya, maka jika terdapat cahaya sensor akan memberikan informasi kepada
kontroler yang kemudian akan memerintahkan kepada aktuator untuk bergerak
mendekati arah cahaya. Kebanyakan kontroler yang digunakan pada robot adalah
peranti digital yang dapat diprogram (atau secara umum disebut komputer) karena
alasan fleksibilitas. Banyak peranti yang dapat dijadikan kontroler robot,
seperti PC, mikrokontroler, PLC serta kontroler digital lainnya (misal FPGA),
namun yang paling banyak dipakai (terutama untuk mobile robot) adalah
mikrokontroler.
Program atau bahasa pemrograman yang dipergunakan bermacam-macam
dari bahasa pemrograman tingkat rendah (bahasa mesin, G-Code), tingkat menengah
(assembly, MASM) dan bahasa pemrograman tingkat tinggi (Basic, C/C++, Java, PHP,
ASP, DELPHI), hingga bahasa pemrograman visual (misalnya : Microsoft Robotics,
Robotic Invention System dari Lego, dan GUI-bot dari Parallax).
Referensi :
- Branwyn, Gareth, Absolute Beginner’s Guide To Building Robot, Que Publishing, 2003.
- Braunl, Thomas, Embedded Robotics, Mobile Robot Design and Applications with Embedded Systems, Second Edition, Springer, 2006. Endro Pitowarno, Robotika, Desain, Kontrol, dan Kecerdasan Buatan, Penerbit Andi, 2006.
- Lindsay, Andy, Robotics with the Boe-Bot, Version 2.2, Parallax Inc., 2004.
- McComb, Gordon & Predko, Myke, Robot Builder’s Bonanza, Third Edition, McGraw-Hill, 2006.
- Society of Robots, How to Build Robot Tutorial, (http://www.societyofrobots.com)
- http://teknikinformatika-esti.blogspot.co.id
- http://unhas.ac.id
- http://gunadarma.ac.id
- https://id.wikipedia.org
- Google.com
Referensi
Branwyn, Gareth, Absolute Beginner’s Guide To Building Robot, Que
Publishing, 2003.
Braunl, Thomas, Embedded Robotics, Mobile Robot Design and
Applications with Embedded Systems, Second Edition, Springer, 2006.
Endro Pitowarno, Robotika, Desain, Kontrol, dan Kecerdasan Buatan,
Penerbit Andi, 2006.
Lindsay, Andy, Robotics with the Boe-Bot, Version 2.2, Parallax
Inc., 2004.
McComb, Gordon & Predko, Myke, Robot Builder’s Bonanza, Third
Edition, McGraw-Hill, 2006.
Society of Robots, How to Build Robot Tutorial,
(http://www.societyofrobots.com)
Invested $100 in Cryptocurrencies in 2017...You would now have $524,215: https://goo.gl/efW8Ef
Invested $100 in Cryptocurrencies in 2017...You would now have $524,215: https://goo.gl/efW8Ef
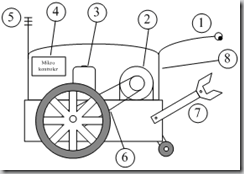
1) sensor 2)aktuator
3)catu daya 4)kontroler 5)sistem komunikasi 6)sistem pemindah
7)manipulator/end effector 8)rangka
Gambar 4 Anatomi suatu mobile robot
Gambar 4 menunjukkan komponen mobile robot yang mewakili anatomi suatu
robot pada umumnya. Sebetulnya anatomi robot yang mirip dengan manusia
dari segi fungsinya. Ekivalensi komponen robot dengan anggota tubuh
manusia apat dilihat pada Tabel 1 Ekivalensi komponen robot dengan
anggota tubuh manusia.
Invested $100 in Cryptocurrencies in 2017...You would now have $524,215: https://goo.gl/efW8Ef
Invested $100 in Cryptocurrencies in 2017...You would now have $524,215: https://goo.gl/efW8Ef
Pak ini link tugas kelompok 3 dari smt 1 matakuliah bapak https://layanantelematika3.blogspot.com/?m=1
ReplyDelete